How to - Iterative multi-angle images fusion¶
%matplotlib inline
import matplotlib.pyplot as plt
import numpy as np
from timagetk.algorithms.blockmatching import blockmatching
from timagetk.tasks.fusion import iterative_fusion
from timagetk.algorithms.pointmatching import pointmatching
from timagetk.algorithms.resample import resample
from timagetk.algorithms.trsf import inv_trsf
from timagetk.algorithms.trsf import create_trsf
from timagetk.io import imread
from timagetk.io.image import _image_from_url
from timagetk.visu.stack import stack_browser
from timagetk.visu.stack import orthogonal_view
from timagetk.visu.mplt import grayscale_imshow
/builds/J-gEBwyb/0/mosaic/timagetk/src/timagetk/components/labelled_image.py:31: TqdmWarning: IProgress not found. Please update jupyter and ipywidgets. See https://ipywidgets.readthedocs.io/en/stable/user_install.html
from tqdm.autonotebook import tqdm
Load the multi-angle images:¶
img_list = [imread(fname) for fname in fnames]
We use the first image of the list, which is a ‘top’ view, as the initial reference image.
ref_img = img_list[0]
float_imgs = img_list[1:]
Down-sample the images to speed-up the computations¶
print("# - Voxelsize (ZYX) for the initial image list:")
print("\n".join([f"Image '{im.filename}' (#{n}): {im.voxelsize}" for n, im in enumerate(img_list)]))
print("# - Shape (ZYX) for the initial image list:")
print("\n".join([f"Image '{im.filename}' (#{n}): {im.shape}" for n, im in enumerate(img_list)]))
# - Voxelsize (ZYX) for the initial image list:
Image '090223-p58-flo-top.lsm' (#0): [1.0, 0.20031953747828882, 0.20031953747828882]
Image '090223-p58-flo-tilt1.lsm' (#1): [1.0, 0.20031953747828882, 0.20031953747828882]
Image '090223-p58-flo-tilt2.lsm' (#2): [1.0, 0.20031953747828882, 0.20031953747828882]
# - Shape (ZYX) for the initial image list:
Image '090223-p58-flo-top.lsm' (#0): (59, 460, 460)
Image '090223-p58-flo-tilt1.lsm' (#1): (50, 460, 460)
Image '090223-p58-flo-tilt2.lsm' (#2): (54, 460, 460)
img_list = [resample(im, voxelsize=[1., 0.5, 0.5]) for im in img_list]
INFO [timagetk.algorithms.resample] Resampling using provided voxel-sizes: [1.0, 0.5, 0.5]
INFO [timagetk.algorithms.resample] Resampling using provided voxel-sizes: [1.0, 0.5, 0.5]
INFO [timagetk.algorithms.resample] Resampling using provided voxel-sizes: [1.0, 0.5, 0.5]
print("# - Voxelsize (ZYX) for the resampled image list:")
print("\n".join([f"Image '{im.filename}' (#{n}): {im.voxelsize}" for n, im in enumerate(img_list)]))
print("# - Shape (ZYX) for the resampled image list:")
print("\n".join([f"Image '{im.filename}' (#{n}): {im.shape}" for n, im in enumerate(img_list)]))
# - Voxelsize (ZYX) for the resampled image list:
Image '090223-p58-flo-top.lsm' (#0): [1.0, 0.5, 0.5]
Image '090223-p58-flo-tilt1.lsm' (#1): [1.0, 0.5, 0.5]
Image '090223-p58-flo-tilt2.lsm' (#2): [1.0, 0.5, 0.5]
# - Shape (ZYX) for the resampled image list:
Image '090223-p58-flo-top.lsm' (#0): (59, 184, 184)
Image '090223-p58-flo-tilt1.lsm' (#1): (50, 184, 184)
Image '090223-p58-flo-tilt2.lsm' (#2): (54, 184, 184)
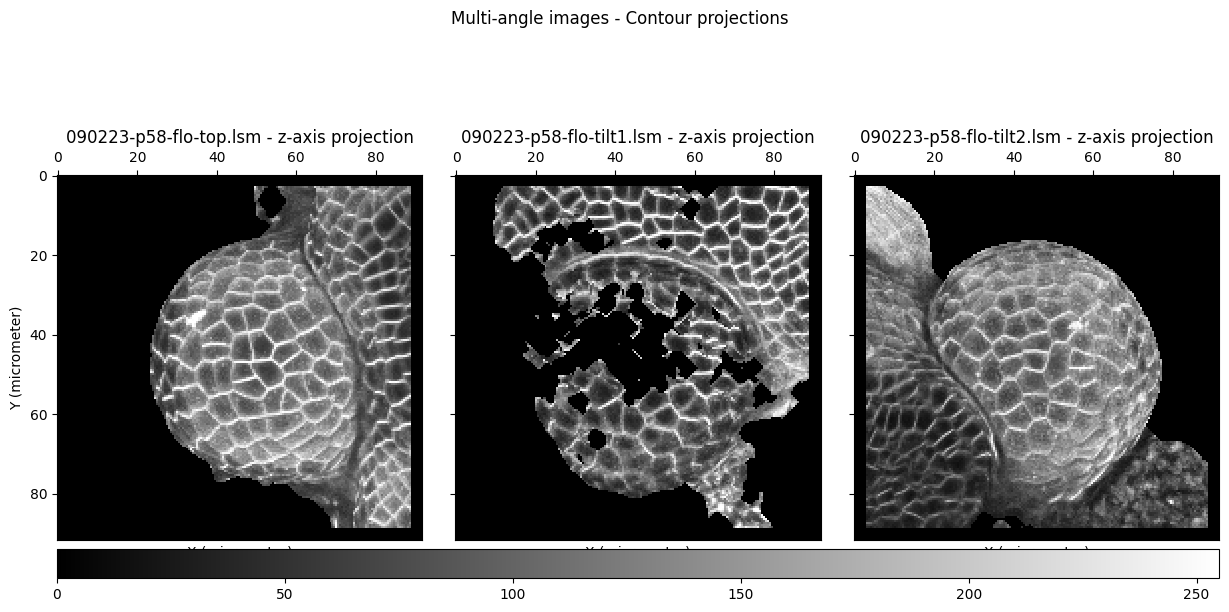
Intensity projections for multi-angle images¶
f = grayscale_imshow(img_list, suptitle="Multi-angle images - Contour projections", title=[img.filename for img in img_list], val_range=[0, 255], threshold=40)
0%| | 0/3 [00:00<?, ?image/s]
33%|███▎ | 1/3 [00:03<00:07, 3.82s/image]
WARNING [guess_intensity_threshold] Could not detect intensity threshold with 'bimodal search'...
INFO [guess_intensity_threshold] Using value obtained from 'percentile search'...
67%|██████▋ | 2/3 [00:07<00:03, 4.00s/image]
100%|██████████| 3/3 [00:12<00:00, 4.07s/image]
100%|██████████| 3/3 [00:12<00:00, 4.04s/image]
Load the manual registration landmarks¶
As the angles between the “views” is important, we start with a manual initialisation using landmarks.
flo_pts_01 = np.loadtxt('p58_t0_floating_ldmk-01.txt')
flo_pts_02 = np.loadtxt('p58_t0_floating_ldmk-02.txt')
ref_pts_01 = np.loadtxt('p58_t0_reference_ldmk-01.txt')
ref_pts_02 = np.loadtxt('p58_t0_reference_ldmk-02.txt')
Create manual initial transformations with pointmatching algorithm¶
man_trsf_01 = pointmatching(flo_pts_01, ref_pts_01, template_img=ref_img, method='rigid')
man_trsf_02 = pointmatching(flo_pts_02, ref_pts_02, template_img=ref_img, method='rigid')
init_trsfs = [man_trsf_01, man_trsf_02]
Iterative fusion¶
Fast iterative fusion¶
In this version of iterative fusion, we performs a vectorfield registration ONLY for the last iteration step to save computation & time.
vf_fused_img = iterative_fusion(img_list, init_trsfs=init_trsfs, vectorfield_at_last=True)
INFO [timagetk.tasks.fusion] Initial rigid registration on the first image of the list...
INFO [timagetk.algorithms.blockmatching] RIGID registration with a 'left' initialisation matrix
INFO [timagetk.algorithms.blockmatching] RIGID registration with a 'left' initialisation matrix
INFO [timagetk.tasks.fusion] Fusion - Initial registration (iteration 0)...
INFO [timagetk.tasks.fusion] Reference image shape: [184, 184]
INFO [timagetk.tasks.fusion] Reference image voxel-sizes: [0.5, 0.5]
INFO [timagetk.tasks.fusion] Floating image #0 shape: [184, 184]
INFO [timagetk.tasks.fusion] Floating image #0 voxel-sizes: [0.5, 0.5]
INFO [timagetk.tasks.fusion] Floating image #1 shape: [184, 184]
INFO [timagetk.tasks.fusion] Floating image #1 voxel-sizes: [0.5, 0.5]
INFO [timagetk.tasks.fusion] Template image shape: [92, 92]
INFO [timagetk.tasks.fusion] Template image voxel-sizes: [1.0, 1.0]
INFO [timagetk.algorithms.blockmatching] AFFINE registration with a 'left' initialisation matrix
INFO [timagetk.algorithms.blockmatching] AFFINE registration with a 'left' initialisation matrix
WARNING [timagetk.third_party.vt_parser] Input `image` is a SpatialImage, option should be in ['gray', 'grey', 'linear', 'cspline'] but got 'nearest'!
WARNING [timagetk.third_party.vt_parser] Input `image` is a SpatialImage, option should be in ['gray', 'grey', 'linear', 'cspline'] but got 'nearest'!
WARNING [timagetk.third_party.vt_parser] Input `image` is a SpatialImage, option should be in ['gray', 'grey', 'linear', 'cspline'] but got 'nearest'!
INFO [timagetk.tasks.fusion] Average image shape: [92, 92]
INFO [timagetk.tasks.fusion] Average image voxel-sizes: [1.0, 1.0]
INFO [timagetk.tasks.fusion] Fused image shape: [92, 92]
INFO [timagetk.tasks.fusion] Fused image voxel-sizes: [1.0, 1.0]
INFO [timagetk.tasks.fusion] Multi-angle fusion done in 8.773s
INFO [timagetk.tasks.fusion] Fusion - Registration iteration 1...
INFO [timagetk.tasks.fusion] Reference image shape: [92, 92]
INFO [timagetk.tasks.fusion] Reference image voxel-sizes: [1.0, 1.0]
INFO [timagetk.tasks.fusion] Floating image #0 shape: [184, 184]
INFO [timagetk.tasks.fusion] Floating image #0 voxel-sizes: [0.5, 0.5]
INFO [timagetk.tasks.fusion] Floating image #1 shape: [184, 184]
INFO [timagetk.tasks.fusion] Floating image #1 voxel-sizes: [0.5, 0.5]
INFO [timagetk.tasks.fusion] Floating image #2 shape: [184, 184]
INFO [timagetk.tasks.fusion] Floating image #2 voxel-sizes: [0.5, 0.5]
INFO [timagetk.tasks.fusion] Template image shape: [92, 92]
INFO [timagetk.tasks.fusion] Template image voxel-sizes: [1.0, 1.0]
INFO [timagetk.algorithms.blockmatching] AFFINE registration with a 'left' initialisation matrix
INFO [timagetk.algorithms.blockmatching] AFFINE registration with a 'left' initialisation matrix
INFO [timagetk.algorithms.blockmatching] AFFINE registration with a 'left' initialisation matrix
WARNING [timagetk.third_party.vt_parser] Input `image` is a SpatialImage, option should be in ['gray', 'grey', 'linear', 'cspline'] but got 'nearest'!
WARNING [timagetk.third_party.vt_parser] Input `image` is a SpatialImage, option should be in ['gray', 'grey', 'linear', 'cspline'] but got 'nearest'!
WARNING [timagetk.third_party.vt_parser] Input `image` is a SpatialImage, option should be in ['gray', 'grey', 'linear', 'cspline'] but got 'nearest'!
INFO [timagetk.tasks.fusion] Average image shape: [92, 92]
INFO [timagetk.tasks.fusion] Average image voxel-sizes: [1.0, 1.0]
INFO [timagetk.tasks.fusion] Fused image shape: [92, 92]
INFO [timagetk.tasks.fusion] Fused image voxel-sizes: [1.0, 1.0]
INFO [timagetk.tasks.fusion] Multi-angle fusion done in 8.656s
INFO [timagetk.tasks.fusion] Fusion - Registration iteration 2...
INFO [timagetk.tasks.fusion] Reference image shape: [92, 92]
INFO [timagetk.tasks.fusion] Reference image voxel-sizes: [1.0, 1.0]
INFO [timagetk.tasks.fusion] Floating image #0 shape: [184, 184]
INFO [timagetk.tasks.fusion] Floating image #0 voxel-sizes: [0.5, 0.5]
INFO [timagetk.tasks.fusion] Floating image #1 shape: [184, 184]
INFO [timagetk.tasks.fusion] Floating image #1 voxel-sizes: [0.5, 0.5]
INFO [timagetk.tasks.fusion] Floating image #2 shape: [184, 184]
INFO [timagetk.tasks.fusion] Floating image #2 voxel-sizes: [0.5, 0.5]
INFO [timagetk.tasks.fusion] Template image shape: [184, 184]
INFO [timagetk.tasks.fusion] Template image voxel-sizes: [0.5, 0.5]
INFO [timagetk.algorithms.blockmatching] AFFINE registration with a 'left' initialisation matrix
INFO [timagetk.algorithms.resample] Resampling using provided voxel-sizes: [0.5, 0.5]
INFO [timagetk.algorithms.blockmatching] VECTORFIELD registration with a 'left' initialisation matrix
INFO [timagetk.algorithms.blockmatching] AFFINE registration with a 'left' initialisation matrix
INFO [timagetk.algorithms.resample] Resampling using provided voxel-sizes: [0.5, 0.5]
INFO [timagetk.algorithms.blockmatching] VECTORFIELD registration with a 'left' initialisation matrix
INFO [timagetk.algorithms.blockmatching] AFFINE registration with a 'left' initialisation matrix
INFO [timagetk.algorithms.resample] Resampling using provided voxel-sizes: [0.5, 0.5]
INFO [timagetk.algorithms.blockmatching] VECTORFIELD registration with a 'left' initialisation matrix
WARNING [timagetk.third_party.vt_parser] Input `image` is a SpatialImage, option should be in ['gray', 'grey', 'linear', 'cspline'] but got 'nearest'!
WARNING [timagetk.third_party.vt_parser] Input `image` is a SpatialImage, option should be in ['gray', 'grey', 'linear', 'cspline'] but got 'nearest'!
WARNING [timagetk.third_party.vt_parser] Input `image` is a SpatialImage, option should be in ['gray', 'grey', 'linear', 'cspline'] but got 'nearest'!
INFO [timagetk.tasks.fusion] Average image shape: [184, 184]
INFO [timagetk.tasks.fusion] Average image voxel-sizes: [0.5, 0.5]
BAL_Inverse2DVectorField: divergence: 2958/33856, non-convergence: 247/33856
INFO [timagetk.tasks.fusion] Fused image shape: [184, 184]
INFO [timagetk.tasks.fusion] Fused image voxel-sizes: [0.5, 0.5]
INFO [timagetk.tasks.fusion] Multi-angle fusion done in 12.313s
print(f"Fused image voxel-size: {vf_fused_img.get_voxelsize()}")
print(f"Fused image shape: {vf_fused_img.get_shape()}")
Fused image voxel-size: [0.5, 0.5]
Fused image shape: [184, 184]
orthogonal_view(vf_fused_img, figsize=(15, 15), suptitle="p58-t0 multi-angle iterative fusion in super-resolution with manual initialization")
---------------------------------------------------------------------------
ValueError Traceback (most recent call last)
Cell In[15], line 1
----> 1 orthogonal_view(vf_fused_img, figsize=(15, 15), suptitle="p58-t0 multi-angle iterative fusion in super-resolution with manual initialization")
File /builds/J-gEBwyb/0/mosaic/timagetk/src/timagetk/visu/stack.py:723, in orthogonal_view(image, x_slice, y_slice, z_slice, suptitle, figname, cmap, **kwargs)
720 if isinstance(image, MultiChannelImage):
721 image = BlendImage([image[ch] for ch in image.get_channel_names()])
--> 723 x_sh, y_sh, z_sh = image.get_shape()[::-1]
724 x_ext, y_ext, z_ext = image.get_extent()[::-1]
725 x_vxs, y_vxs, z_vxs = image.get_voxelsize()[::-1]
ValueError: not enough values to unpack (expected 3, got 2)